my proyects related to AI
soft robotics and mechanisms.
Interests
I am deeply interested in projects that merge cutting-edge technology with practical applications. My primary focus lies in the development of soft robotics and biomimetic systems, which aim to revolutionize rehabilitation and assistive devices. I have worked extensively on vacuum-powered artificial muscles, exploring their potential for exoskeletons and rehabilitation systems. My fascination with artificial intelligence drives me to integrate machine learning into industrial solutions, where automation and data-driven decision-making can significantly improve efficiency. Additionally, I am passionate about advancing the field of mechatronics through innovative 3D printing techniques, which enable rapid prototyping and testing of complex designs. Research and development are central to my career goals, particularly in areas where engineering meets healthcare and smart systems.
Chatbot with GenAI
I developed a chatbot leveraging generative AI to enable more natural and fluid conversations. To achieve this, we utilized various AWS services, including Amazon Lex, DynamoDB, Lambda, S3, and Bedrock. Additionally, we integrated Slack APIs to seamlessly connect the chatbot with a Slack channel, enhancing its accessibility and functionality.

Design and Control of a Fabric Vacuum-Powered
Artificial Muscle for Rehabilitation Devices
Cerebral palsy (CP) affects motor functions and is prevalent in Peru at twice the global rate. Limited access to therapy highlights the need for innovative solutions. This study introduces a robotic rehabilitation device with artificial muscles for hip movements, achieving precise control with less than 2.5% error in tests.
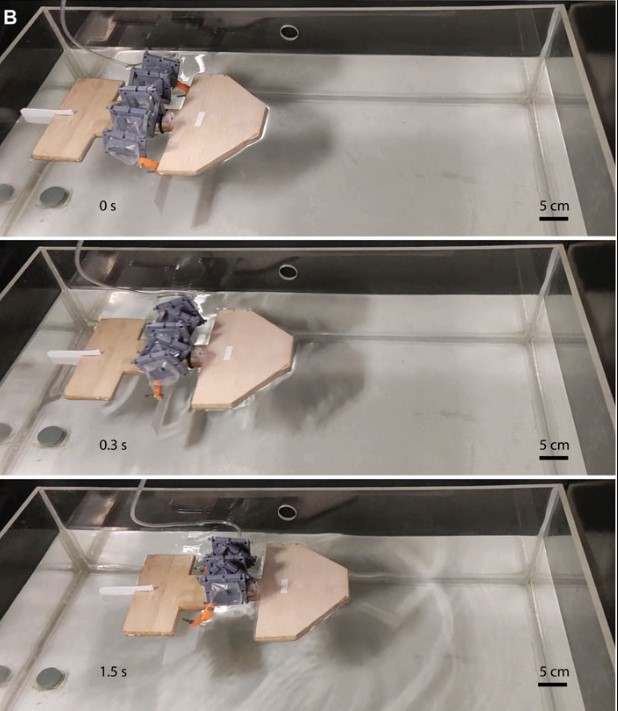
Versatile Vacuum-Powered Artificial Muscles
Through Replaceable External Reinforcements
Soft pneumatic artificial muscles are ideal for soft robotics due to their safety and flexibility. This study introduces a versatile vacuum-powered artificial muscle (VPAM) with tunable motions, enabling tasks like twisting, bending, and rotary movements using replaceable reinforcements. VPAM demonstrated adaptability in soft machines, showcasing its potential for wearable devices and locomotion in unpredictable environments.
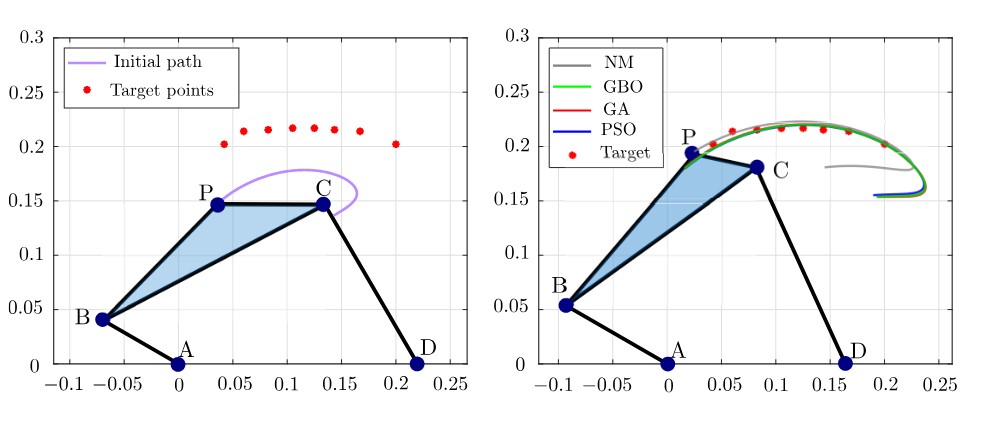
Synthesis of Planar Linkages Using Optimization Methods
This paper examines four optimization methods—Nelder-Mead, gradient-based, genetic algorithm, and particle swarm optimization—applied to planar mechanism synthesis, including four-bar and six-bar mechanisms. It highlights their characteristics, computational requirements, and suitability based on problem needs, offering guidance for selecting appropriate methods. The study aims to assist designers without declaring a universally superior approach.